Moteur de direction qui ne répond pas
Ici aussi il y a deux causes possibles : le bauderate n’est pas le bon ou le moteur est juste débranché.
Bauderate incorrect
Il faut changer le paramètre dans le launchfile de sensor. Sur bolide1 il est à 115200 et sur bolide2 il est à 1000000. Si vous avez des doutes vous pouvez utiliser le logiciel : dynamixel wizard 2. Voir aussi le tuto dynamixel wizard 2 pour utiliser le logiciel.
Moteur de direction débranché
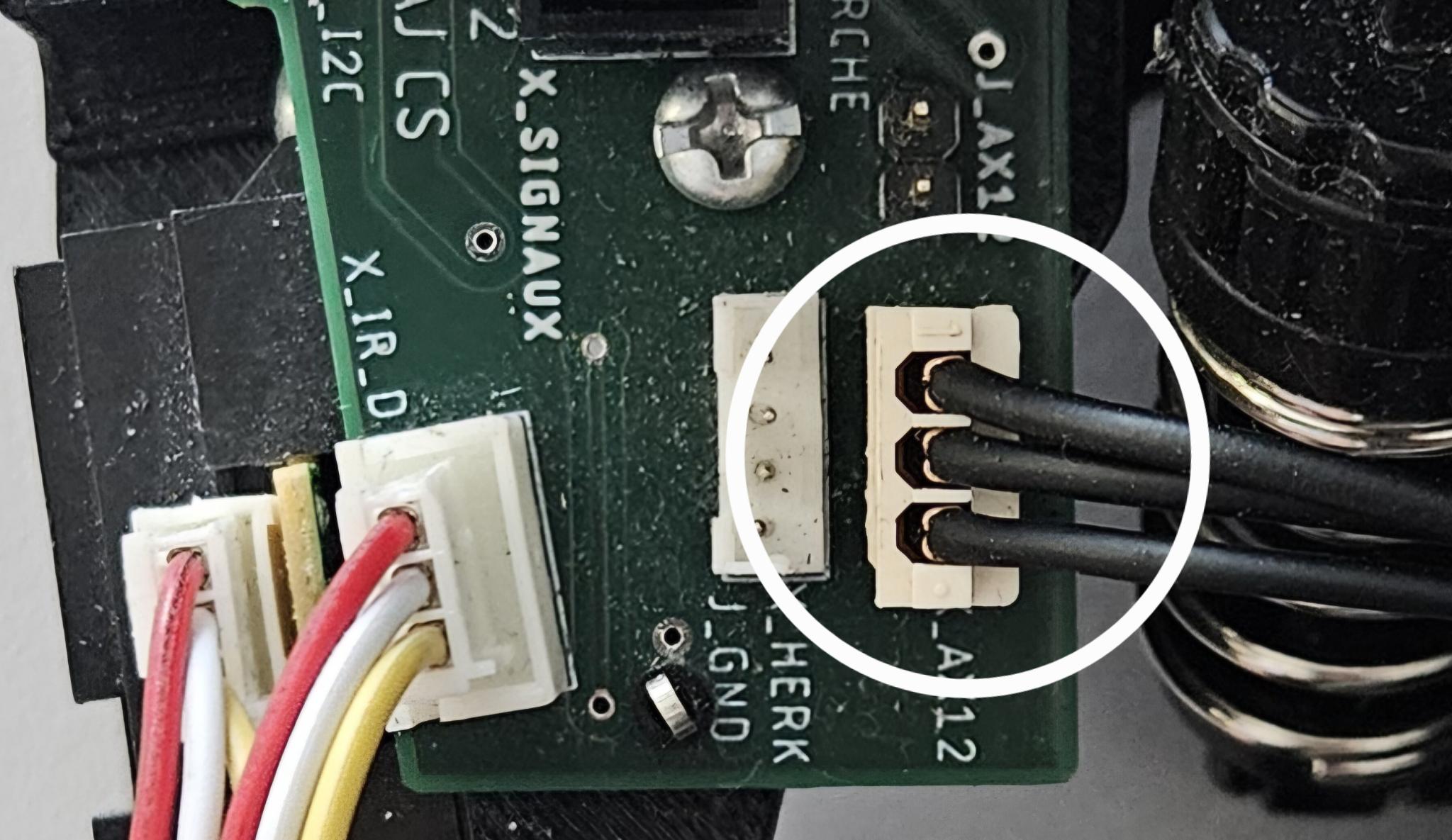
Il faut que le cable du haut soit branché à la carte d’alimentation comme sur la photo suivante :
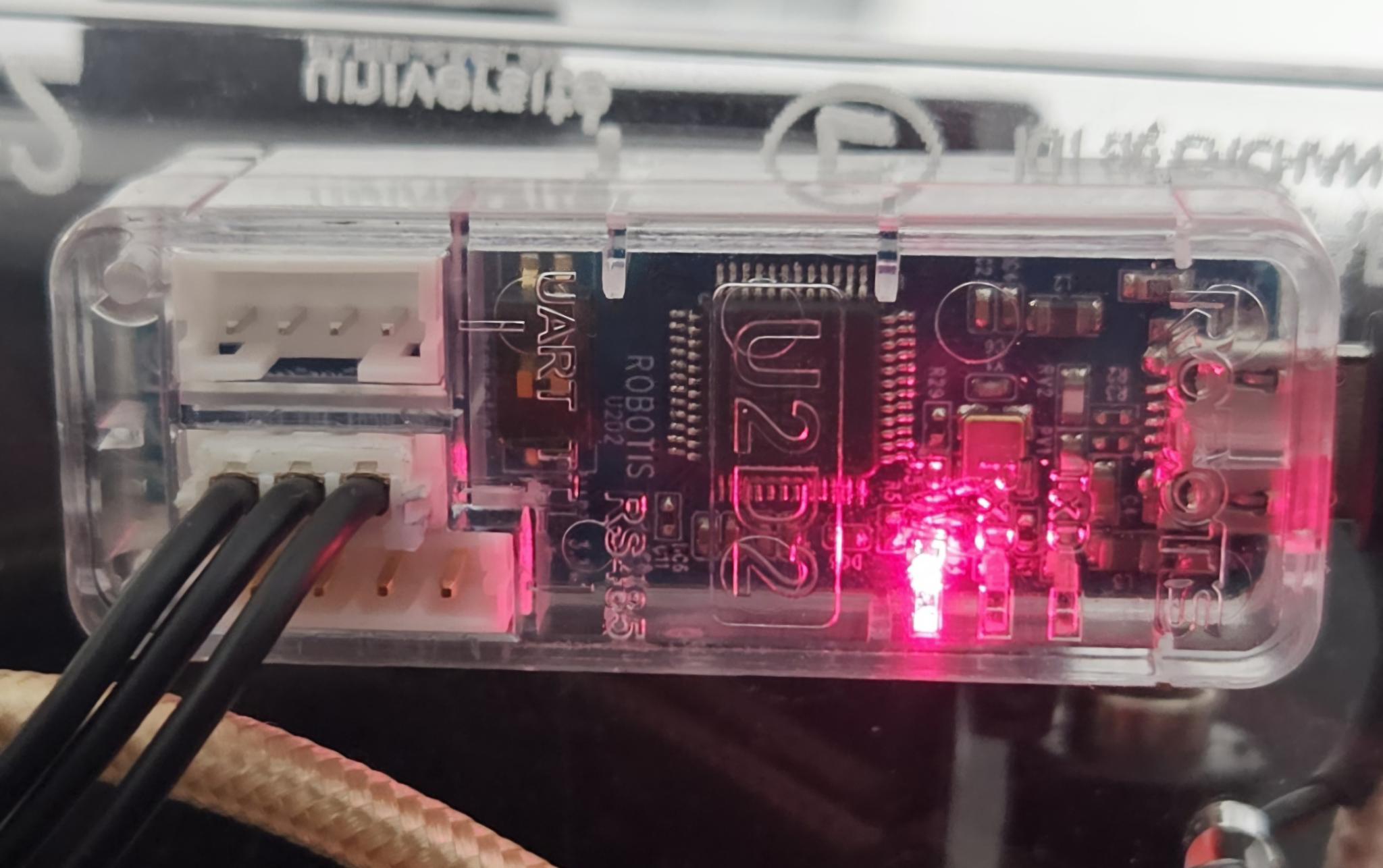
et le cable du bas soit branché à l’u2d2 comme sur la photo suivante :